Data Driven Optimal Control of Two Point Boundary Problems
 |
Introduction
The main objective of this work is to learn the controller for the finite horizon time varying systems when the boundary conditions are given. Initially, we focus on the linear time-varying system and then further extending it to the nonlinear systems. We mainly focus on the optimalaity, stability and robustness of the controller.In summary, the key contributions of this work are twofold:
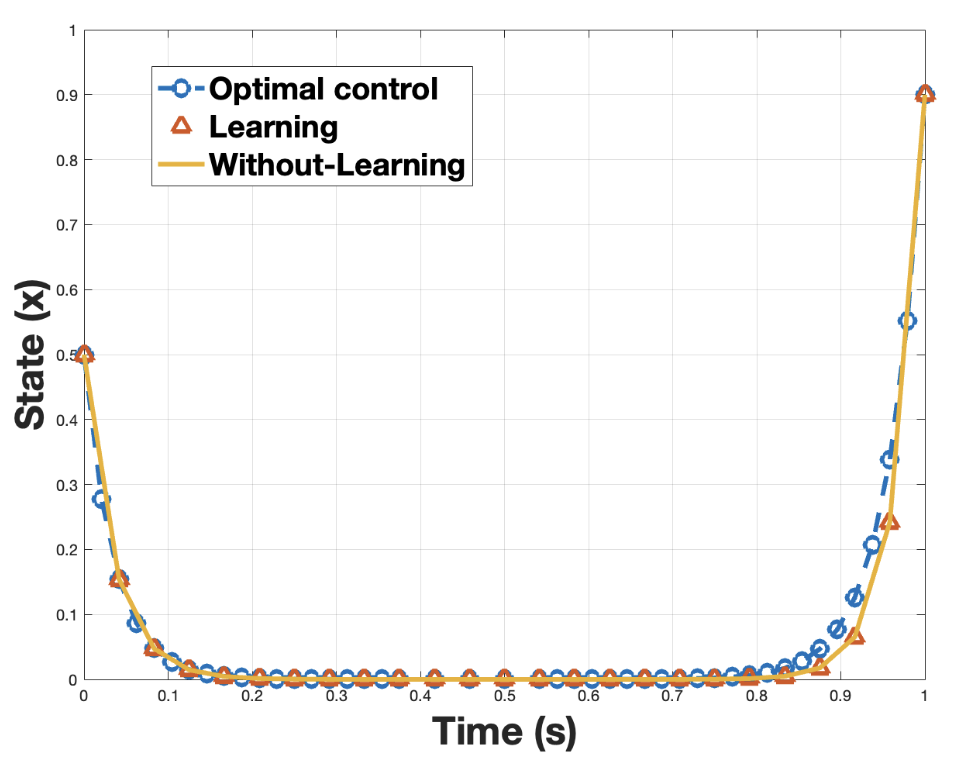
- 1.We provide a solution for the two-boundary optimal control problem for dynamical systems that does not require knowledge of system models.
- 2.We introduce a reinforcement learning framework that is based on an insight from the physical dynamics. This framework is simple to implement and results in a suboptimal solution, which converges to the optimal one as the control time interval gets large