Home
Publications
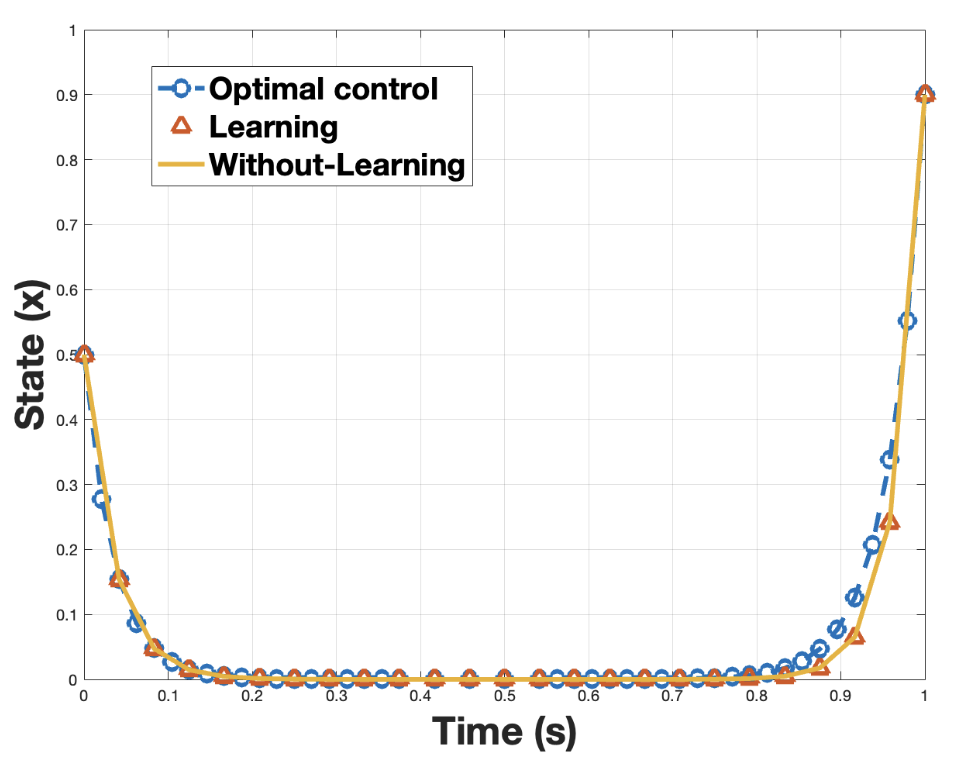 | Singular Perturbation-based Reinforcement Learning of Two-Point Boundary Optimal Control SystemsACC'22 (American Control Conference)Summary: Optimal control of two-point boundary systems. [Paper] [Code] We solve the problem of two-point boundary opti- mal control of linear time-varying systems with unknown model dynamics using reinforcement learning. Leveraging singular perturbation theory techniques, we transform the time-varying optimal control problem into two time-invariant subproblems. This allows the utilization of an off-policy iteration method to learn the controller gains. We show that the performance of the learning-based controller approximates that of the model-based optimal controller and the approximation accuracy improves as the control problem’s time horizon increases. We also provide a simulation example to verify the results |